Məlumat 4D daşıyıcı konveyer sistemi





zəncirli konveyer
| layihə | Əsas məlumatlar | Qeyd |
| model | SX-LTJ-1.0T -600H | |
| Motor reduktoru | DİKİŞ | |
| struktur növü | Çərçivə alüminium ərintisindən, ayaqları və döngələri isə karbon poladdan hazırlanıb | |
| nəzarət üsulu | Manual/müstəqil/onlayn/avtomatik idarəetmə | |
| təhlükəsizlik tədbirləri | Elektrik kilidi, hər iki tərəfdən qoruyucu təlimatlar | |
| standartı qəbul edin | JB/T7013-93 | |
| faydalı yük | Maksimum 1000 KG | |
| yüklərin yoxlanılması | Fotoelektrik Sensorlar | SICK/P+F |
| zəncir yolu | Aşağı sürtünmə neylon izi | |
| konveyer zənciri | Donghua zənciri | |
| rulman | Fukuyama Avadanlıqları, Möhürlənmiş Bilyalı Podşniklər | |
| ötürmə sürəti | 12m/dəq | |
| Səthin təmizlənməsi və örtülməsi | Turşulama, fosfatlama, çiləmə | |
| səs-küyə nəzarət | ≤73db | |
| səth örtüyü | kompüter boz | Əlavə edilmiş nümunələr |
Avadanlıq quruluşu
Konveyer çərçivə, dayaqlar, sürücü bloku və s. ibarətdir. Çərçivə alüminium ərintisindən hazırlanmışdır və hər iki ucu sabit dişsiz geri dönən təkərlərdir. Konveyer zənciri P=15,875 mm aralığa malik düz ikiqat zəncirdir. Zəncir dayağı yüksək molekulyar polietilendən (UHMW) özünü yağlama effektinə malikdir. Qaynaqlanmış dayaqlar bolt təzyiq lövhəsi ilə əsas çərçivə ilə birləşdirilir, M20 vint tənzimləyici ayaqları yerə bağlanır və daşıma səthinin hündürlüyü +25 mm tənzimlənə bilər. Sürücülük cihazı ortada quraşdırılmış yavaşlama mühərrikindən, sürücü şaftından, ötürücü dişli dəstindən, motor oturacağından və zəncir dartma qurğusundan ibarətdir və vida tipli tənzimləyici gərginlik kasnağı daşıma zəncirini gərginləşdirir.
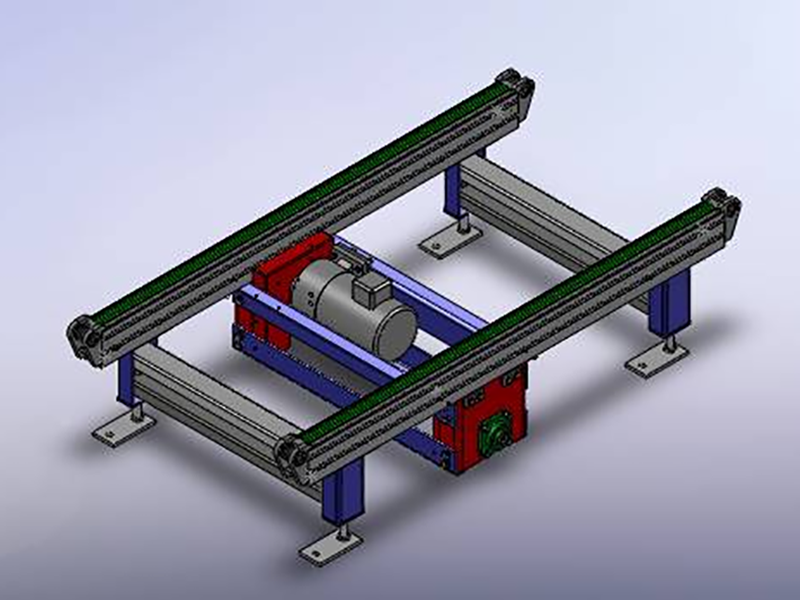
iş prinsipi:
Mühərrik sürücü şaftını ötürmə qrupu vasitəsilə idarə edir və sürücü şaft paletin daşıma funksiyasını həyata keçirmək üçün daşıma zəncirini idarə edir.
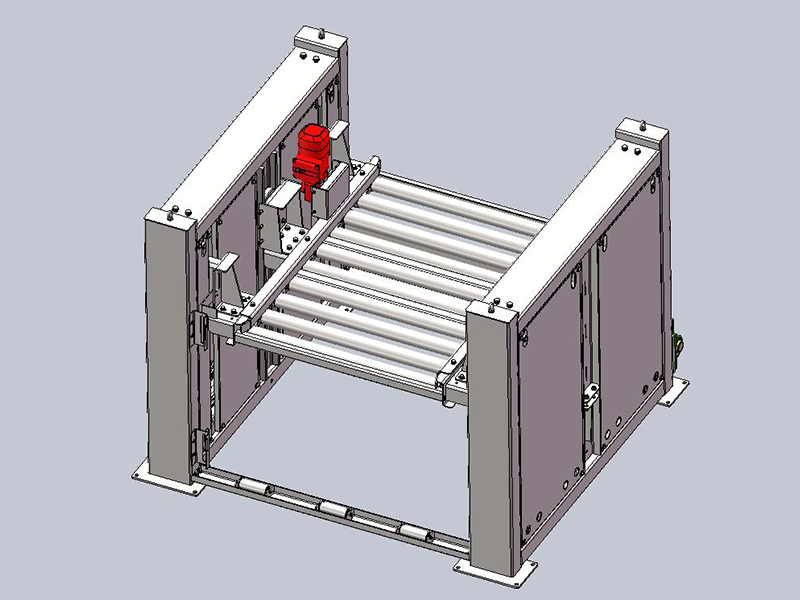
Rolikli konveyer
| Maddə | Əsas məlumatlar | Qeydlər |
| Model | SX-GTJ-1.0T -600H | polad konstruksiya |
| Motor reduktoru | DİKİŞ | |
| struktur növü | karbon polad əyilmə | |
| nəzarət üsulu | Manual/müstəqil/onlayn/avtomatik idarəetmə | |
| faydalı yük | Maksimum 1000 KG | |
| ötürmə sürəti | 12m/dəq | |
| diyircəkli | 76 cüt zəncirli rulon | |
| sürücü zənciri | Huadong Zəncir Fabriki | |
| rulman | Ha ox | |
| Səthin təmizlənməsi və örtülməsi | Turşulama, fosfatlama, çiləmə | |
Avadanlıq quruluşu
Avadanlıq quruluşu: Roller masası maşını çərçivə, dayaqlar, rulonlar, sürücülər və digər bölmələrdən ibarətdir. Roller φ76x3 tək tərəfli ikiqat dişli çarxlı sinklənmiş diyircəkli, diyircəkli aralıq P=174.5mm, tək tərəfli cüt dişli çarx. Qaynaqlanmış dayaqlar bolt təzyiq lövhəsi ilə əsas çərçivə ilə birləşdirilir, M20 vint tənzimləyici ayaqları yerə bağlanır və daşıma səthinin hündürlüyü +25 mm tənzimlənə bilər. Sürücü qurğu ortada quraşdırılmış yavaşlama mühərrikindən, ötürücü dişli dəstindən, motor oturacağından və zəncir dartma qurğusundan ibarətdir.
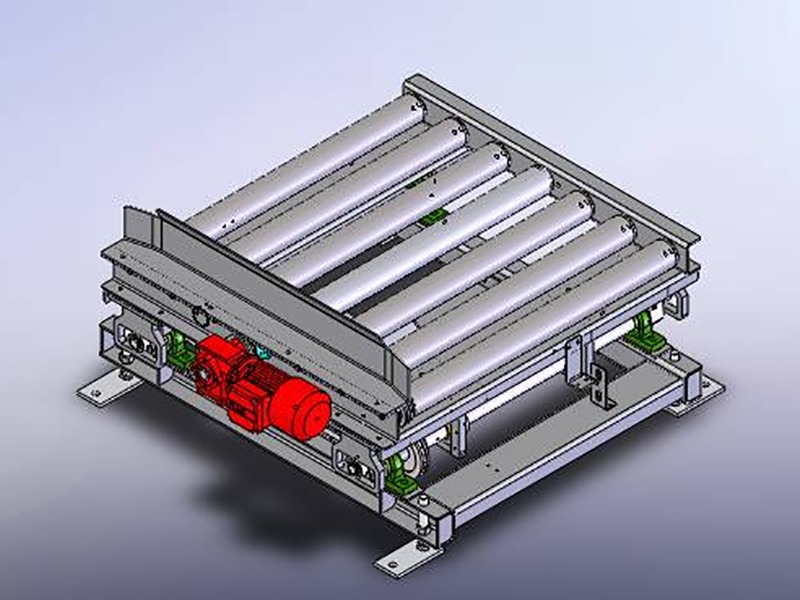
İş prinsipi: Mühərrik çarxı zəncirdən keçirir və konveyerin daşıma funksiyasını həyata keçirmək üçün rulon başqa bir zəncir vasitəsilə bitişik diyircəyə, sonra isə başqa bir rulona ötürülür.
Doldurma və köçürmə maşını
| layihə | Əsas məlumatlar | Qeyd |
| model | SX-YZJ-1.0T-6 0 0H | polad konstruksiya |
| Motor reduktoru | DİKİŞ | |
| struktur növü | karbon polad əyilmə | |
| nəzarət üsulu | Manual/müstəqil/onlayn/avtomatik idarəetmə | |
| təhlükəsizlik tədbirləri | Elektrik kilidi, hər iki tərəfdən qoruyucu təlimatlar | |
| Standart | JB/T7013-93 | |
| faydalı yük | Maksimum 1000 KG | |
| yüklərin yoxlanılması | Fotoelektrik Sensorlar | SICK/P+F |
| diyircəkli | 76 cüt zəncirli rulon | |
| Rulmanlar və korpuslar | Rulman: Harbin mili; Rulman oturacağı: Fushan FSB | |
| ötürmə sürəti | 12m/dəq | |
| Səthin təmizlənməsi və örtülməsi | Turşulama, fosfatlama, çiləmə | |
| səs-küyə nəzarət | ≤73dB | |
| səth örtüyü | kompüter boz | Əlavə edilmiş nümunələr |
Avadanlıq quruluşu
Avadanlıq quruluşu: Rolik ötürücü maşın daşıyıcı hissələrdən, qaldırıcı mexanizmlərdən, istiqamətləndirici komponentlərdən və digər bölmələrdən ibarətdir. Daşıma səthinin hündürlüyünün tənzimlənməsi +25 mm. Qaldırma mexanizmi motorla idarə olunan krank qolu prinsipini qəbul edir və sürücülük cihazı ortada quraşdırılmış reduksiya mühərrikindən, ötürücü dişli dəstindən, motor oturacağından və zəncir gərginliyindən ibarətdir.
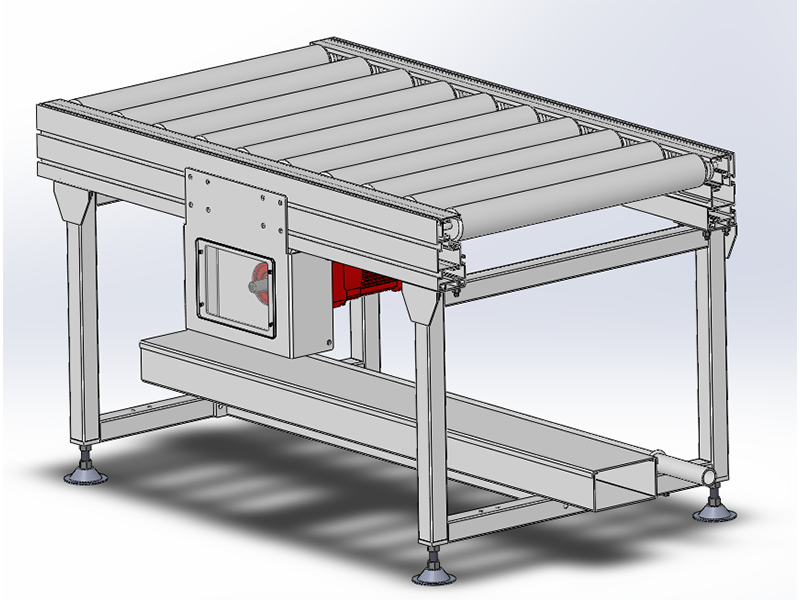
İş prinsipi: Palet uyğun konveyer tərəfindən avadanlıqlara çatdırıldıqda, domkrat mühərriki işləyir, altlığı qaldırmaq üçün kam mexanizmini idarə edir və dokrat mühərriki yerində olduqda dayanır; daşıyıcı mühərrik işə düşür, paleti dok avadanlığına çatdırır və motor dayanır, domkrat mühərriki işləyir və kam mexanizmi avadanlığı endirmək üçün idarə olunur və o, yerində olduqda, bir iş dövrünü tamamlamaq üçün domkrat mühərriki dayanır.
Keçid konveyeri
| 1) layihə | Əsas məlumatlar | Qeyd |
| model | SX-GDLTJ-1,0T-500H-1,6L | |
| Motor reduktoru | DİKİŞ | |
| struktur növü | Ayaqlar və əyilmiş karbon polad | |
| nəzarət üsulu | Manual/müstəqil/onlayn/avtomatik idarəetmə | |
| təhlükəsizlik tədbirləri | Elektrik kilidi, hər iki tərəfdən qoruyucu təlimatlar | |
| Standart | JB/T7013-93 | |
| faydalı yük | Maksimum 1000 KG | |
| yüklərin yoxlanılması | Fotoelektrik Sensorlar | SICK/P+F |
| zəncir yolu | Aşağı sürtünmə neylon izi | |
| konveyer zənciri | Donghua zənciri | |
| Rulmanlar və korpuslar | Rulman: Harbin mili, podşipnik oturacağı: Fukuyama FSB | |
| ötürmə sürəti | 12m/dəq | |
| Səthin təmizlənməsi və örtülməsi | Turşulama, fosfatlama, çiləmə | |
| səs-küyə nəzarət | ≤73dB | |
| səth örtüyü | kompüter boz | Əlavə edilmiş nümunələr |
Avadanlıq quruluşu
Avadanlıq quruluşu: Bu avadanlıq qaldırıcı və rəf arasındakı birləşmədə istifadə olunur və konveyer çərçivə, dayaqlar və sürücülük blokundan ibarətdir. Konveyer zənciri P=15,875 mm aralığa malik düz ikiqat zəncirdir. Zəncir dayağı yüksək molekulyar polietilendən (UHMW) özünü yağlama effektinə malikdir. Qaynaqlı ayaqları, rəf gövdəsinə bağlıdır. Hərəkət qurğusu ortada quraşdırılmış yavaşlama mühərrikindən, sürücü şaftından, ötürücü dişli dəstindən, motor oturacağından və zəncirvari dartma qurğusundan ibarətdir və vida tipli tənzimləyici gərginlik kasnağı daşıma zəncirini gərginləşdirir.
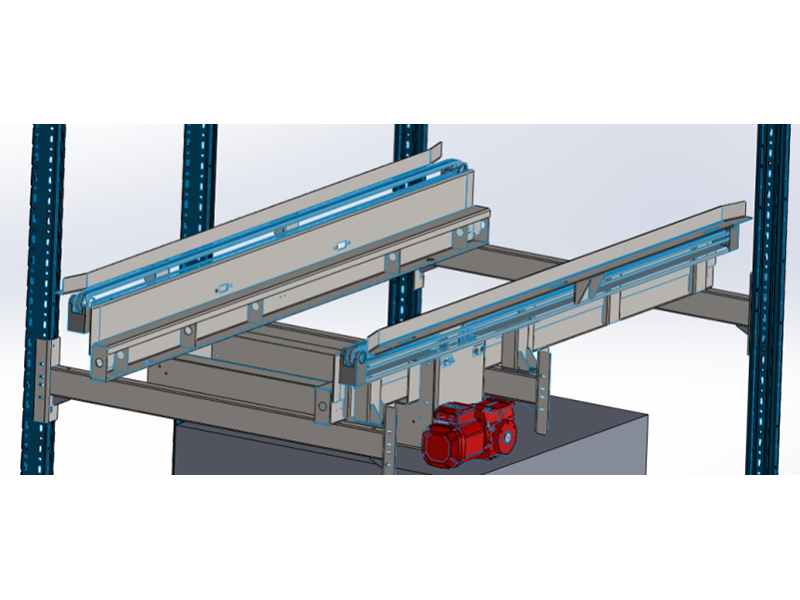
İş prinsipi: Mühərrik sürücü şaftını ötürücü qrupdan keçir, sürücü şaft isə paletin daşıma funksiyasını həyata keçirmək üçün daşıma zəncirini idarə edir.
mərtəbə lifti
| layihə | Əsas məlumatlar | Qeyd |
| model | LDTSJ-1.0T-700H | polad konstruksiya |
| Motor reduktoru | DİKİŞ | |
| struktur növü | Sütun: karbon polad əyilmə Xarici tərəf: polad lövhə möhürü | |
| nəzarət üsulu | Manual/müstəqil/onlayn/avtomatik idarəetmə | |
| təhlükəsizlik tədbirləri | Elektrik kilidi, düşməyi dayandırma cihazı | |
| Standart | JB/T7013-93 | |
| faydalı yük | Maksimum 1000 KG | |
| yüklərin yoxlanılması | Fotoelektrik Sensorlar | SICK/P+F |
| diyircəkli | 76 cüt zəncirli rulon | |
| qaldırıcı zəncir | Donghua zənciri | |
| rulman | Ümumi podşipniklər: Harbin milinin açar rulmanları: NSK | |
| qaçış sürəti | Daşınma sürəti: 16m/dəq, qaldırma sürəti: 6m/dəq | |
| Səthin təmizlənməsi və örtülməsi | Turşulama, fosfatlama, çiləmə | |
| səs-küyə nəzarət | ≤73dB | |
| səth örtüyü | kompüter boz | Əlavə edilmiş nümunələr |
əsas quruluşu və xüsusiyyətləri
Çərçivə: 5 mm karbon polad əyilmiş lövhə sütun kimi istifadə olunur və xarici polad lövhə ilə möhürlənir;
Qaldırıcı hissə:
Qaldırıcının yuxarı hissəsində qaldırıcı çərçivə quraşdırılıb, çərçivə karbon poladdan hazırlanır və qaldırıcı mühərrik qaldırıcı dişli çarxı zəncirlə işləmək üçün hərəkətə gətirir.
Yükləmə platforması:
Karbon poladdan hazırlanmışdır. Yükləmə platforması standart konveyerlə təchiz edilmişdir.
iş prinsipi:
Qaldırıcı mühərrik qaldırma işini başa çatdırmaq üçün yükləmə platformasını hərəkətə gətirir; yükləmə platformasındakı konveyer malların liftə rahat daxil olub çıxmasını təmin edə bilər.



